2026
Discrete variational calculus for double-bracket dissipation
Anthony Bloch, Sebastian J. Ferraro, David Martin de Diego, Shreyas Bharadwaj
Preprint 2026
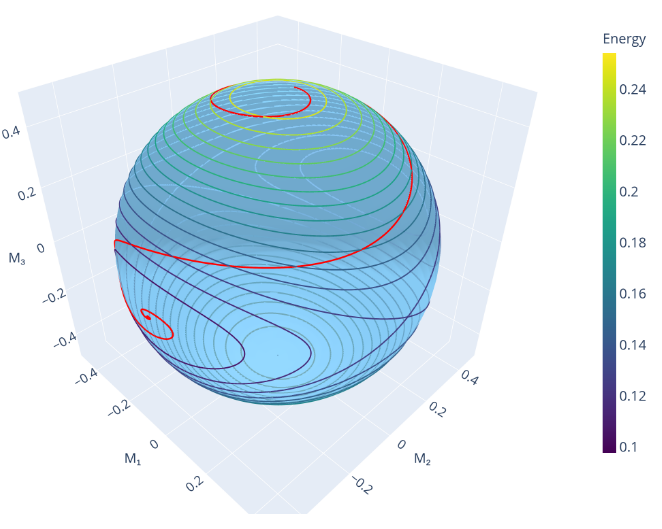
Discrete variational methods show excellent performance in numerical simulations of mechanical systems. In this paper, we adapt discrete variational integrators for the case of mechanical systems with double-bracket dissipation. In particular, we will work with forced Euler-Poincaré and forced Lie-Poisson systems, and the case of interest for us will be when the coadjoint orbits remain invariant, but the energy is decreasing along the orbit. This particular kind of dissipative system appears in various physical systems such as satellites with dampers, geophysical fluids, plasma physics and stellar dynamics. The proposed geometric integrator preserves the coadjoint orbits exactly. We highlight the advantages of this feature by comparing it with other general-purpose methods (including higher-order ones) across different numerical simulations.
Discrete variational calculus for double-bracket dissipation
Anthony Bloch, Sebastian J. Ferraro, David Martin de Diego, Shreyas Bharadwaj
Preprint 2026
Discrete variational methods show excellent performance in numerical simulations of mechanical systems. In this paper, we adapt discrete variational integrators for the case of mechanical systems with double-bracket dissipation. In particular, we will work with forced Euler-Poincaré and forced Lie-Poisson systems, and the case of interest for us will be when the coadjoint orbits remain invariant, but the energy is decreasing along the orbit. This particular kind of dissipative system appears in various physical systems such as satellites with dampers, geophysical fluids, plasma physics and stellar dynamics. The proposed geometric integrator preserves the coadjoint orbits exactly. We highlight the advantages of this feature by comparing it with other general-purpose methods (including higher-order ones) across different numerical simulations.
Robust Least-Squares Optimization for Data-Driven Predictive Control: A Geometric Approach
Shreyas Bharadwaj, Bamdev Mishra, Cyrus Mostajeran, Alberto Padoan, Jeremy Coulson, Ravi N. Banavar
Learning for Dynamics and Control Conference (L4DC) 2026
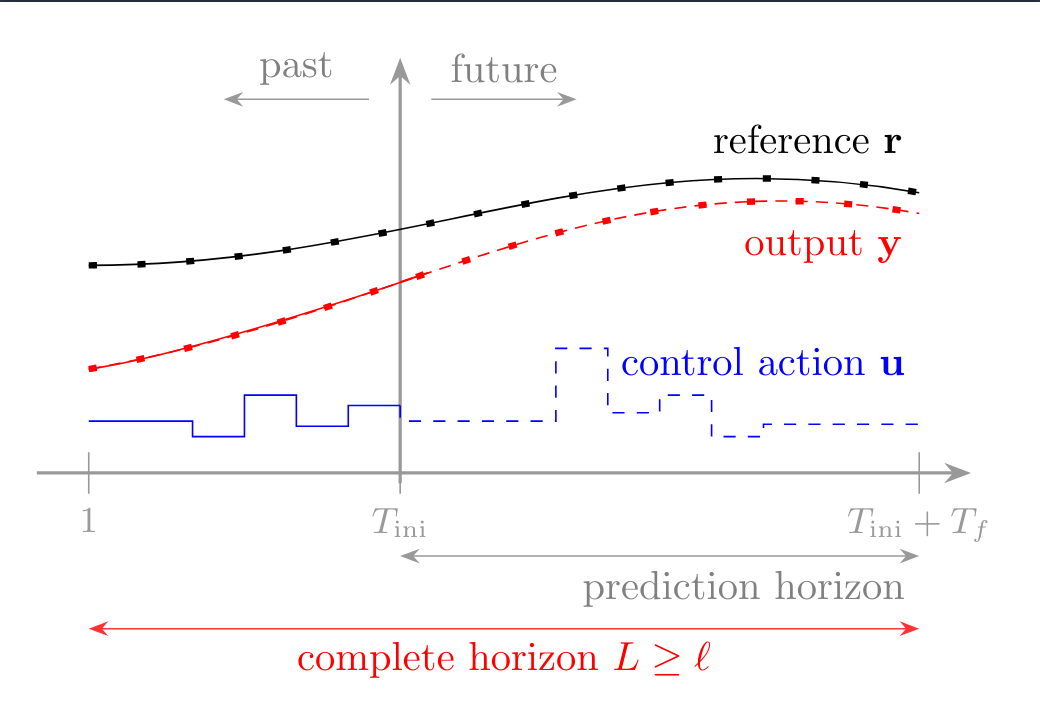
The paper studies a geometrically robust least-squares problem that extends classical and norm-based robust formulations. Rather than minimizing residual error for fixed or perturbed data, we interpret least-squares as enforcing approximate subspace inclusion between measured and true data spaces. The uncertainty in this geometric relation is modeled as a metric ball on the Grassmannian manifold, leading to a min-max problem over Euclidean and manifold variables. The inner maximization admits a closed-form solution, enabling an efficient algorithm with a transparent geometric interpretation. Applied to robust finite-horizon linear-quadratic tracking in data-enabled predictive control, the method improves upon existing robust least-squares formulations, achieving stronger robustness and favorable scaling under small uncertainty.
Robust Least-Squares Optimization for Data-Driven Predictive Control: A Geometric Approach
Shreyas Bharadwaj, Bamdev Mishra, Cyrus Mostajeran, Alberto Padoan, Jeremy Coulson, Ravi N. Banavar
Learning for Dynamics and Control Conference (L4DC) 2026
The paper studies a geometrically robust least-squares problem that extends classical and norm-based robust formulations. Rather than minimizing residual error for fixed or perturbed data, we interpret least-squares as enforcing approximate subspace inclusion between measured and true data spaces. The uncertainty in this geometric relation is modeled as a metric ball on the Grassmannian manifold, leading to a min-max problem over Euclidean and manifold variables. The inner maximization admits a closed-form solution, enabling an efficient algorithm with a transparent geometric interpretation. Applied to robust finite-horizon linear-quadratic tracking in data-enabled predictive control, the method improves upon existing robust least-squares formulations, achieving stronger robustness and favorable scaling under small uncertainty.

Min-Max Grassmannian Optimization for Online Subspace Tracking
Shreyas Bharadwaj, Bamdev Mishra, Cyrus Mostajeran, Alberto Padoan, Jeremy Coulson, Ravi N. Banavar
Conference on Decision and Control (CDC) 2026
This paper discusses robustness guarantees for online tracking of time-varying subspaces from noisy data. Building on recent work in optimization over a Grassmannian manifold, we introduce a new approach for robust subspace tracking by modeling data uncertainty in a Grassmannian ball. The robust subspace tracking problem is cast into a min-max optimization framework, for which we derive a closed-form solution for the worst-case subspace, enabling a geometric robustness adjustment that is both analytically tractable and computationally efficient, unlike iterative convex relaxations. The resulting algorithm, GeRoST (Geometrically Robust Subspace Tracking), is validated on two case studies: tracking a linear time-varying system and online foreground-background separation in video.
Min-Max Grassmannian Optimization for Online Subspace Tracking
Shreyas Bharadwaj, Bamdev Mishra, Cyrus Mostajeran, Alberto Padoan, Jeremy Coulson, Ravi N. Banavar
Conference on Decision and Control (CDC) 2026
This paper discusses robustness guarantees for online tracking of time-varying subspaces from noisy data. Building on recent work in optimization over a Grassmannian manifold, we introduce a new approach for robust subspace tracking by modeling data uncertainty in a Grassmannian ball. The robust subspace tracking problem is cast into a min-max optimization framework, for which we derive a closed-form solution for the worst-case subspace, enabling a geometric robustness adjustment that is both analytically tractable and computationally efficient, unlike iterative convex relaxations. The resulting algorithm, GeRoST (Geometrically Robust Subspace Tracking), is validated on two case studies: tracking a linear time-varying system and online foreground-background separation in video.
2025
Feedback Linearizable Discretization of Second-Order Mechanical Systems
Shreyas N. B., David Martin de Diego, Ravi N. Banavar
European Controls Conference (ECC) 2025
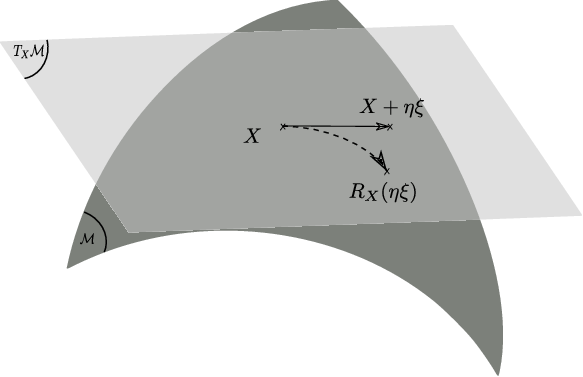
Mechanical systems are most often described by a set of continuous-time, nonlinear, second-order differential equations (SODEs) of a particular structure governed by the covariant derivative. The digital implementation of controllers for such systems requires a discrete model of the system and hence requires numerical discretization schemes. Feedback linearizability of such sampled systems, however, depends on the discretization scheme employed. In this article, we utilize retraction maps and their lifts to construct feedback linearizable discretizations for SODEs which can be applied to many mechanical systems.
Feedback Linearizable Discretization of Second-Order Mechanical Systems
Shreyas N. B., David Martin de Diego, Ravi N. Banavar
European Controls Conference (ECC) 2025
Mechanical systems are most often described by a set of continuous-time, nonlinear, second-order differential equations (SODEs) of a particular structure governed by the covariant derivative. The digital implementation of controllers for such systems requires a discrete model of the system and hence requires numerical discretization schemes. Feedback linearizability of such sampled systems, however, depends on the discretization scheme employed. In this article, we utilize retraction maps and their lifts to construct feedback linearizable discretizations for SODEs which can be applied to many mechanical systems.
2024
Nonlinear Infinite Dimensional Model for a Two Degree-of-Freedom Flexible WIng
Shreyas N. Bharadwaj, Vivek Natarajan, Aditya A. Paranjape
AIAA SciTech Forum 2025
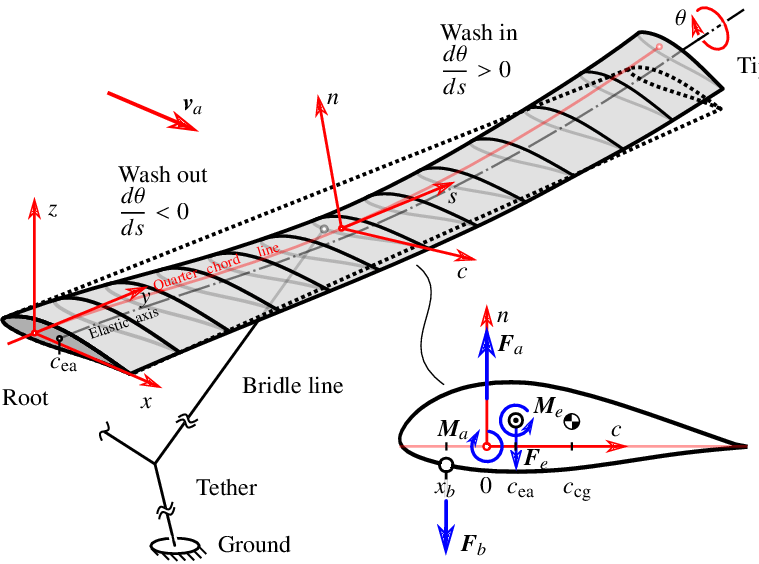
An infinite-dimensional nonlinear model for a two-degree-of-freedom highly flexible wing is presented in this paper. The model describes the coupled dynamics of bending and torsion in terms of a set of nonlinear partial differential equations. When torsion is ignored, the resulting transverse bending equations are identical to those for the well-known elastica. The in vacuo response and the flutter onset characteristics of the model are compared with standard aeroelastic models using numerical simulation. The nonlinear model presented here could potentially serve as a benchmark for PDE-based control design methods, providing an intermediate step between low-fidelity linear models and nonlinear simulation models whose high fidelity is usually accompanied by large computational times.
Nonlinear Infinite Dimensional Model for a Two Degree-of-Freedom Flexible WIng
Shreyas N. Bharadwaj, Vivek Natarajan, Aditya A. Paranjape
AIAA SciTech Forum 2025
An infinite-dimensional nonlinear model for a two-degree-of-freedom highly flexible wing is presented in this paper. The model describes the coupled dynamics of bending and torsion in terms of a set of nonlinear partial differential equations. When torsion is ignored, the resulting transverse bending equations are identical to those for the well-known elastica. The in vacuo response and the flutter onset characteristics of the model are compared with standard aeroelastic models using numerical simulation. The nonlinear model presented here could potentially serve as a benchmark for PDE-based control design methods, providing an intermediate step between low-fidelity linear models and nonlinear simulation models whose high fidelity is usually accompanied by large computational times.